放大器”,是用来操控伺服电机的一种操控器,其作用类似于变频器作用于一般沟通马达,归于伺服体系的一部分,首要运用于高精度的定位体系。一般是经过方位、速度和力矩三种方法对伺服电机进行操控,完成高精度的传动体系定位,现在是传动技能的高端产品。

现在干流的伺服驱动器均选用数字信号处理器(DSP)作为操控中心,能够完成比较复杂的操控算法,完成数字化、网络化和智能化。功率器材遍及选用以智能功率模块(IPM)为中心规划的驱动电路,IPM内部集成了驱动电路,一起具有过电压、过电流、过热、欠压等毛病检测维护电路,在主回路中还参加软发动电路,以减小发动进程对驱动器的冲击。
功率驱动单元首要经过三相全桥整流电路对输入的三相电或许市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再经过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步沟通伺服电机。功率驱动单元的整个进程能够简略的说便是AC-DC-AC的进程。整流单元(AC-DC)首要的拓扑电路是三相全桥不控整流电路。
跟着伺服体系的大规模运用,伺服驱动器运用、伺服驱动器调试、伺服驱动器修理都是伺服驱动器在当今比较重要的技能课题,越来越多工控技能服务商对伺服驱动器进行了技能深层次研讨。
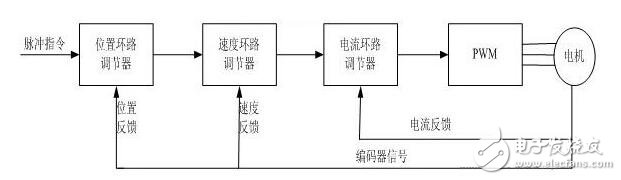
伺服驱动器是现代运动操控的重要组成部分,被广泛运用于工业机器人及数控加工中心等自动化设备中。尤其是运用于操控沟通永磁同步电机的伺服驱动器已经成为国内外研讨热门。当时沟通伺服驱动器规划中遍及选用根据矢量操控的电流、速度、方位3闭环操控算法。该算法中速度闭环规划合理与否,关于整个伺服操控体系,特别是速度操控功用的发挥起到关键作用。

1、方位操控:方位操控形式一般是经过外部输入的脉冲的频率来确认滚动速度的巨细,经过脉冲的个数来确认滚动的视点,也有些伺服能够经过通讯方法直接对速度和位移进行赋值,因为方位形式能够对速度和方位都有很严厉的操控,所以一般运用于定位设备。
2、转矩操控:转矩操控方法是经过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的巨细,能够经过即时的改动模拟量的设定来改动设定的力矩巨细,也可经过通讯方法改动对应的地址的数值来完成。
运用首要在对原料的手里有严厉要求的环绕和放卷的设备中,例如绕线设备或拉光纤设备,转矩的设定要根据环绕的半径的改动随时更改以保证原料的受力不会跟着环绕半径的改动而改动。
3、速度形式:经过模拟量的输入或脉冲的频率都能够进行滚动速度的操控,在有上位操控设备的外环PID操控时速度形式也能够进行定位,但有必要把电机的方位信号或直接负载的方位信号给上位反应以做运算用。方位形式也支撑直接负载外环检测方位信号,此刻的电机轴端的编码器只检测电机转速,方位信号就由直接的终究负载端的检测设备来供给了,这样的长处在于能够削减中心传动进程中的差错,增加了整个体系的定位精度。
假如对电机的速度、方位都没有要求,只需输出一个恒转矩,当然是用转矩形式。
假如对方位和速度有必定的精度要求,而对实时转矩不是很关怀,用转矩形式不太便利,用速度或方位形式比较好。
假如上位操控器有比较好的闭环操控功用,用速度操控作用会好一点,假如自身要求不是很高,或许根本没有实时性的要求,选用方位操控方法。

方位操控:是指驱动器对电机的转速、转角和转矩均于操控,上位机对驱动器发脉冲串进行转速与转角的操控,输入的脉冲频率操控电机的转速,输入的脉冲个数操控电机旋转的视点。
速度操控:是指驱动器仅对电机的转速和转矩进行操控,电机的转角由CNC取驱动器反应的A、B、Z编码器信号进行操控,CNC对驱动器宣布的是模拟量(电压)信号,规模为+10V~-10V,正电压操控电机正转,负电压操控电机回转,电压值的巨细决议电机的转数。
转矩操控:是指伺服驱动器仅对电机的转矩进行操控,电机输出的转矩不在随负载变,只遵从于输入的转矩指令,上位机对驱动器宣布的是模拟量(电压)信号,规模为+10V~-10V,正电压操控电机正转,负电压操控电机回转,电压值的巨细决议电机输出的转矩。电机的转速与转角由上位机操控。


