技术中,定位指令是一种很重要的控制手段。它能够在一定程度上帮助设备或机器人精确地移动到预定的位置,以此来实现各种复杂的操作。在定位指令中,绝对定位是一种常用的定位方式,它是指根据预先设定的目标位置,直接计算出设备或机器人需要移动的距离和方向,以此来实现精确定位。本文将详细的介绍绝对定位的概念、原理以及使用方法。
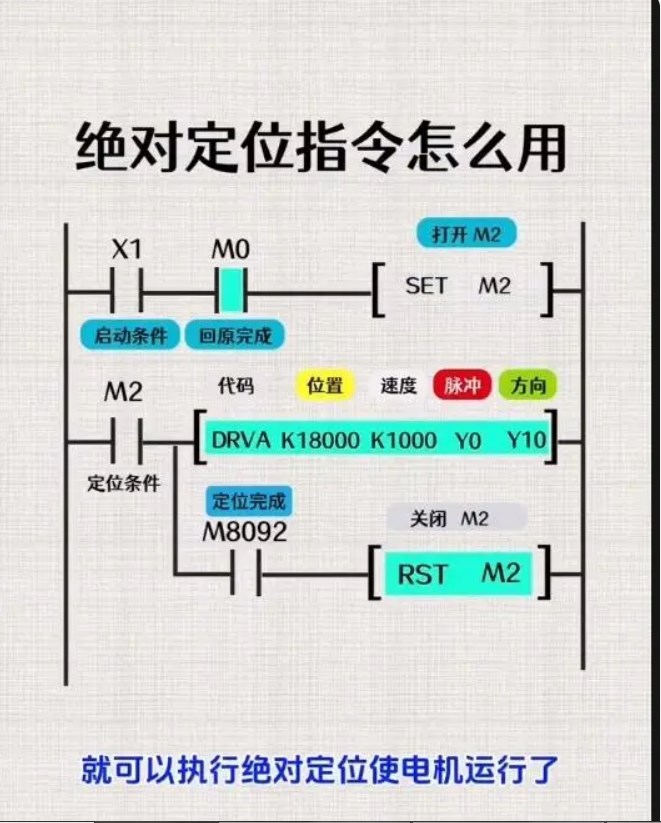
绝对定位是一种基于目标位置的直接定位方法,它不需要依赖设备或机器人当前的位置信息,而是直接根据预先设定的目标位置来计算需要移动的距离和方向。绝对定位的优点是定位精度高,不受外因的影响,适用于各种复杂环境下的定位任务。但是,绝对定位的缺点是需要预先知道目标位置,对于未知环境的适应性较差。
绝对定位的原理是根据设备或机器人的运动学模型,通过计算目标位置与当前位置之间的距离和方向,来控制设备或机器人的运动。运动学模型通常包括设备的关节角度、长度等参数,以及设备的运动学方程。通过求解运动学方程,能够获得设备或机器人在各个关节上的转动角度,以此来实现精确定位。
1.确定目标位置:根据实际的需求,预先设定设备或机器人需要到达的目标位置。目标位置可以是二维坐标系中的点,也可以是三维空间中的点。
2.获取当前位置:通过传感器或其他手段,实时获取设备或机器人当前的位置信息。当前位置信息可以是二维坐标系中的点,也可以是三维空间中的点。
3.计算距离和方向:根据目标位置和当前位置,计算设备或机器人需要移动的距离和方向。距离能够最终靠勾股定理或其他数学方法计算得到,方向能够最终靠向量运算得到。
4.控制设备或机器人运动:根据计算出的距离和方向,控制设备或机器人的运动。运动控制能够最终靠电机驱动、液压驱动等方式实现。
5.检测并调整:在设备或机器人运动过程中,实时检测其位置信息,并与目标位置做比较。假如发现偏差,能够准确的通过真实的情况调整运动策略,以实现更精确的定位。
1.选择正真适合的运动学模型:根据设备或机器人的结构特点和运动特性,选择合适的运动学模型。不同的运动学模型可能会影响到定位精度和稳定性。
2.准确获取当前位置信息:当前位置信息的获取对绝对定位的精度至关重要。因此,要选择合适的传感器或其他手段,确保能够准确、实时地获取当前位置信息。
3.考虑外因:在实际应用中,可能会受到外因的影响,如温度、湿度、磁场等。这一些因素有几率会使传感器的测量误差,进而影响到定位精度。因此,在使用绝对定位时,需要仔细考虑这些外因,并进行一定的补偿处理。
的问题如下:uint8_tUART_RX_BUF[1024]__attribute__ ((at(0X20001000)));//就是将串口接收的数据
,在自动化生产、加工和控制过程中,经常要对加工工件的尺寸或机械设备移动的距离进行准确
控制-程序 /
控制教程 /
问题 伺服电机是一种可以依据输入信号精确控制位置、速度和扭矩的电机。它在自动化的工业领域得到普遍应用,数据中心、机器人、医疗设施等都离不开伺服电机的运动控制。而伺服
SocketRocket objective-C WebSocket开发包
【星嵌电子XQ138F-EVM开发板体验】(原创)8.安全FPGA防御黑客病毒(芯片设计制造级防护)源代码
【米尔-全志T113-i开发板试用】米尔-全志T113-i开发环境搭建


